Las redes dentro de los vehículos están comenzando a migrar de arquitecturas de dominio a arquitecturas zonales, un enfoque que simplificará y acelerará la comunicación en un vehículo utilizando menos protocolos, menos cableado y, en última instancia, un menor costo.
Las arquitecturas zonales dividirán los vehículos en zonas que serán más manejables y flexibles, pero llegar allí llevará tiempo. Hoy en día hay tanta tecnología heredada en los vehículos que los fabricantes de automóviles deben respaldar una colección de protocolos. Por ejemplo, los vehículos pueden admitir dispositivos móviles Bluetooth, USB y LTE para información y entretenimiento, junto con algunos protocolos desarrollados internamente. Para las cámaras, MIPI es el protocolo predominante. Y para el control en tiempo real de ADAS, ECU y fusión de sensores, probablemente admitirán redes de área de controlador (CAN), redes de interconexión local (LIN), Ethernet y otros.
Uno de los elementos clave para permitir este cambio son las comunicaciones más rápidas. Hace varios años, el 93% de las redes automotrices funcionaban a velocidades inferiores a 100 Mbps, y es poco probable que mucho de eso cambie de la noche a la mañana. De hecho, es probable que 10/100/1000BASE-T1 Ethernet automotriz y los autobuses de baja velocidad, como CAN y sus variantes, seguirán prestando servicio a la mayoría de las comunicaciones de baja velocidad. Pero con el tiempo se agregarán velocidades de varios gigabits a los vehículos para un movimiento rápido de datos a medida que los automóviles comiencen a tomar decisiones más importantes basadas en información de las distintas zonas.
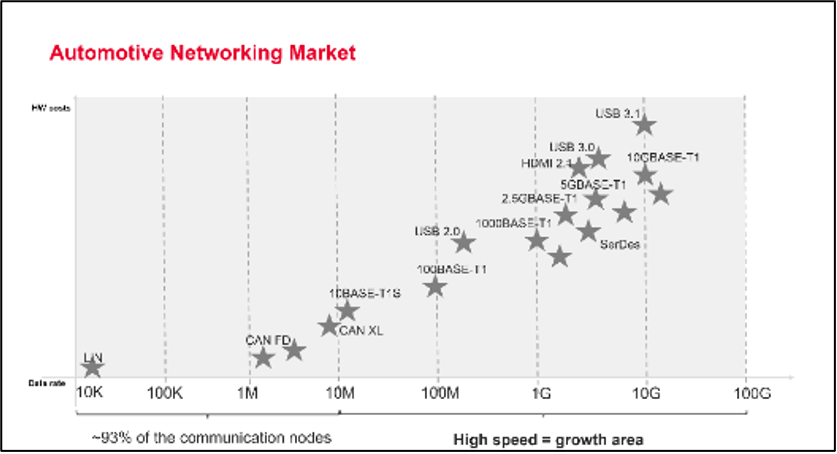
Fig. 1: Comparación de varios tipos de tecnologías de redes automotrices. Fuente: Vista clave
"La industria automotriz espera que Automotive Ethernet no reemplace toda la conectividad heredada", dijo Jae Yong, arquitecto de soluciones y planificador de tecnologías Automotive Ethernet en Keysight. “En cambio, seguiremos viendo una combinación de diferentes protocolos y métodos de comunicación. El cúmulo gigante de estrellas en la parte superior derecha de la Figura 1 es el más dinámico y es donde se están produciendo muchas innovaciones. Como sabemos por la física, las velocidades en baudios más altas aumentan la interferencia eléctrica, las fuentes de ruido, los reflejos, las atenuaciones y otras pérdidas que afectan las señales y los datos transportados dentro de esas señales. Cuanto más rápidas sean las velocidades de datos, más desafiante y crítico será realizar pruebas antes de la implementación. Esperamos que Ethernet automotriz multigigabit satisfaga las necesidades de comunicaciones de mayor velocidad basadas en los estándares IEEE 802.3ch e IEEE 802.3cy. Por ejemplo, existe un nuevo estándar Ethernet óptico multigigabit para automóviles que fue lanzado recientemente por el grupo IEEE 802.3cz. Es un momento interesante para la creación de redes automotrices y debemos esperar muchos desafíos e innovaciones por delante”.
Otros están de acuerdo y citan una comunicación más rápida como una dirección evolutiva más que como un cambio total. Sin embargo, las ventajas de este cambio son significativas.
David Fritz, vicepresidente de sistemas híbridos y virtuales de Software de Siemens Digital Industries, señala a Automotive Ethernet como el probable líder en este ámbito. “Muy pronto el ancho de banda admitirá todas las implementaciones de autonomía L4 y L5. Además, las tramas CAN se pueden transmitir a través de la red Ethernet, lo que permite que las puertas de enlace administren redes zonales CAN y CAN FD locales que admitan ECU existentes. Los aspectos de peso y potencia de Automotive Ethernet son muy superiores a los de las redes CAN convencionales. Can FD está emergiendo como un competidor de Ethernet, y aún no se sabe cuál prevalecerá. Sin embargo, un indicio es que estamos viendo proveedores de sensores, actuadores y ECU que admiten directamente Automotive Ethernet debido a las propiedades mencionadas anteriormente”.
Ethernet automotriz es la opción más arraigada. "Uno de los objetivos aquí es reemplazar las soluciones patentadas, en lugar de utilizar tantas tecnologías de red estandarizadas (protocolos, controladores y PHY) como sea posible", dijo Robert Schweiger, director del grupo de soluciones automotrices de Cadencia. “Otro objetivo es reducir la variedad de diferentes tecnologías de red para crear una arquitectura de red más homogénea. Para hacerlo, es necesario aprovechar Ethernet automotriz, por ejemplo, 10BASE-T1, 100BASE-T1, 1000BASE-T1, 10G BASE-T1”.
La clave para las arquitecturas zonales será un aumento significativo en el ancho de banda general y la eficiencia de la red del vehículo, señaló Schweiger, y la arquitectura zonal dependerá principalmente de Automotive Ethernet, ASA Motion-Link/MIPI A-PHY, MIPI CSI2, MIPI DSI, POF, CAN y LIN. "Por supuesto, esto puede variar de un OEM a otro, y aún existen algunas soluciones patentadas".
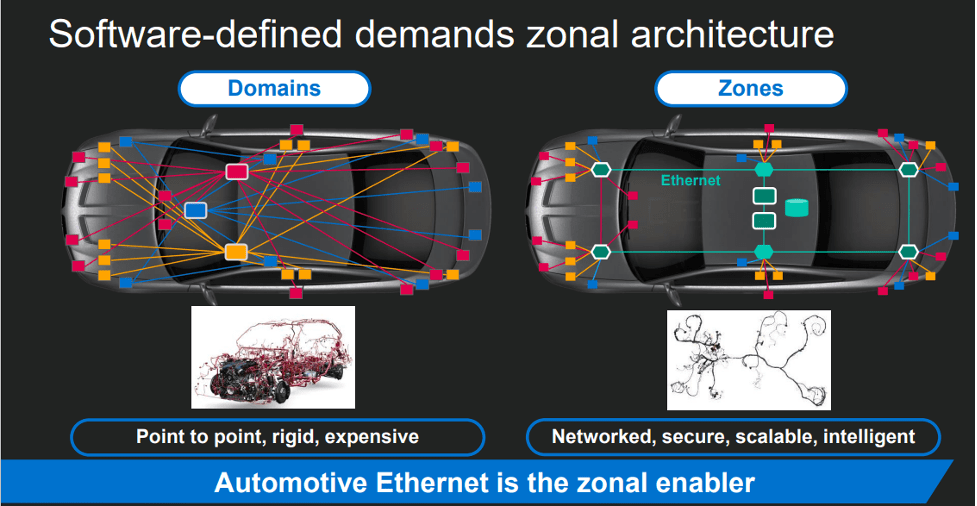
Fig. 2: La arquitectura zonal simplifica el enfoque de dominio tradicional. Fuente: Marvell
Por supuesto, nada cambia de la noche a la mañana en el diseño de automóviles. Los ciclos de diseño suelen durar al menos varios años, y los diseños de algunos componentes y subsistemas pueden permanecer en el mercado durante mucho más tiempo. Como resultado, el panorama de las redes automotrices seguirá siendo una mezcla de protocolos y esquemas dependientes de la aplicación. Algunos servirán para aplicaciones que no sean en tiempo real, como información y entretenimiento y monitoreo del comportamiento de los ocupantes en la cabina. Otros protocolos respaldarán la seguridad y otras aplicaciones en tiempo real.
"Por ejemplo, los conductores recibirán una alerta si los niños o las mascotas quedan desatendidos cuando el conductor abandona el vehículo", señaló Kevin Kershner, arquitecto y planificador de soluciones de Automotive SerDes Technologies en Keysight. "Los OEM están trabajando para simplificar el diseño de aplicaciones en tiempo real y al mismo tiempo aumentar el rendimiento y la velocidad de las comunicaciones, especialmente en la conducción autónoma".
Además, las arquitecturas eléctricas y electrónicas (E/E) en la industria automotriz están evolucionando para soportar requisitos cada vez más complejos, incluido el papel de los sistemas de asistencia al conductor basados en sensores (ADAS) y las aplicaciones de conducción autónoma (AD).
“Dentro y alrededor del vehículo hay abundante tecnología de visualización, incluidos paneles de tablero de alta resolución, paneles de espejos retrovisores y opciones de información y entretenimiento comparables a los servicios de dispositivos electrónicos de consumo”, dijo Kershner. "Muchos sensores, incluidas cámaras, lidar y radar, capturan datos de alta resolución y luego los transmiten o los agregan con otros datos de sensores para su posterior procesamiento mediante una aplicación ADAS/AD".
En cuanto a los sistemas de cámaras de visión envolvente, varias cámaras también pueden enviar vídeo a las pantallas del interior del vehículo. "En este caso, son los requisitos de la aplicación los que impulsan la elección de E/E, incluido el número total de sensores y el ancho de banda necesario para transferir los datos", dijo. “Esto significa que la elección de la tecnología de comunicación depende verdaderamente de la aplicación. Las funciones de baja velocidad no deben utilizar autobuses de alta velocidad "sobrediseñados" debido al costo, la complejidad y el consumo de energía de los dispositivos de mayor velocidad. Ciertas tecnologías son punto a punto, mientras que otras admiten la eficiencia de nodos multipunto. Algunos enlaces de alta velocidad son simétricos y admiten la comunicación bidireccional entre nodos informáticos de alta potencia. Por el contrario, otros están diseñados para ser asimétricos para admitir aplicaciones que requieren un alto rendimiento en una sola dirección (por ejemplo, salida de cámara en sentido descendente, comando y control en sentido ascendente).
Del dominio a la arquitectura zonal
Las ECU son componentes básicos para los vehículos. Controlan diversas funciones, como el funcionamiento del motor, la transmisión, el frenado de emergencia y otras funciones de monitoreo, como la presión de los neumáticos y el control del clima en la cabina. A diferencia de una arquitectura zonal, una arquitectura de dominio agrupa varias funciones en dominios sin considerar la ubicación física de esos dominios. En las arquitecturas de dominio, las ECU que soportan cada dominio pueden estar distribuidas dentro del vehículo. Como resultado, es posible que se necesiten mazos de cables largos para conectarse a estos dominios.
Tradicionalmente, los OEM utilizaban arquitectura de dominio en sus diseños. Los protocolos de red principales utilizados en una arquitectura de dominio son la red de área del controlador (CAN) y la red de interconexión local (LIN), las cuales han sido utilizadas por los OEM para realizar control en tiempo real de diversas funciones. CAN (ISO 11898-1:2003) es un protocolo de red serie que admite tres velocidades diferentes:
- Baja velocidad: 125 Kbps a una longitud de bus de 500 metros (máximo)
- Alta velocidad: 1 Mbps a una longitud de bus de 40 metros (máximo)
- Velocidad de datos flexible (CAN FD): 15 Mbps a una longitud de bus de 10 metros (máximo)
CAN ha demostrado ser confiable y de costo relativamente bajo para soportar dispositivos de multiplexación y control distribuido en tiempo real, incluidas las ECU. LIN (ISO 17987-2), que complementa a CAN, también es un protocolo de red serie. Admite una velocidad de datos más baja de 19.2 Kbit/s y normalmente se utiliza en el control de la luz de la cabina, como la atenuación.
A medida que la industria avanza hacia la incorporación de más software y electrónica para respaldar los vehículos definidos por software y la conducción autónoma, aumenta la demanda de comunicaciones de mayor velocidad. Si bien las opiniones varían, algunos expertos sugieren que la futura conducción autónoma requeriría velocidades de transferencia de datos en el rango de 50 Gbps para admitir varias funciones ADAS y ECU en tiempo real. Hoy en día, Ethernet tiene una capacidad de 100 Gbps, con el potencial de alcanzar tera bits por segundo en los próximos años, según Ethernet Alliance.
Esto puede cambiar a medida que evolucionen nuevas tecnologías y nuevas funciones. En los últimos años, las redes automotrices han pasado de una arquitectura zonal basada en dominios a una arquitectura zonal basada en Ethernet para automóviles.
Amir Bar-Niv, vicepresidente de marketing automotriz de Marvell, dijo que el peso total de los mazos de cables dentro de un vehículo eléctrico se ubica justo detrás del peso del motor y el chasis de un automóvil. Reducir la longitud y la cantidad de cables disminuye el peso total de un vehículo, aumenta la eficiencia del combustible (o la autonomía en un vehículo eléctrico) y simplifica el proceso de fabricación.
También hay un esfuerzo por simplificar las comunicaciones. Actualmente, las redes individuales deben admitir una variedad de anchos de banda y una variedad de protocolos diferentes. ADAS, por ejemplo, impulsará la necesidad de aumentar el ancho de banda de los protocolos de red.
La comunicación inalámbrica puede ayudar, en parte porque gran parte de ella se ha desarrollado y perfeccionado fuera del sector automovilístico. "Dado que los protocolos inalámbricos no suelen ser específicos de la automoción, se integrarán aún más para permitir el soporte de dispositivos electrónicos de consumo", afirmó Bernhard Rill, director de asociaciones automotrices, línea de negocio automotriz de Brazo explicado. “En toda la industria, se está trabajando para determinar cómo se pueden utilizar estos protocolos inalámbricos para futuros casos de uso específicos del automóvil. Los automóviles utilizan hoy en día un gran volumen de redes, lo que impulsa una tendencia a consolidar la comunicación. Hay un fuerte enfoque en las redes cuando se trata de arquitecturas E/E. Los fabricantes de equipos originales de automóviles están mirando hacia CAN-FD y redes basadas en Ethernet como 10BASE-T1S. Además, la red troncal interoperable Ethernet de 2.5 Gbps debe reforzarse para su uso en producción en masa, y las conexiones de alta velocidad utilizarán PCIe para diseños de silicio coherentes”.
Arquitectura zonal versus arquitectura de dominio
La idea de una arquitectura zonal que utilice Ethernet de mayor velocidad está ganando impulso porque es más sencilla y fácil de fabricar en comparación con la arquitectura de dominio. Este enfoque tecnológico utiliza múltiples interruptores zonales para controlar varias funciones.
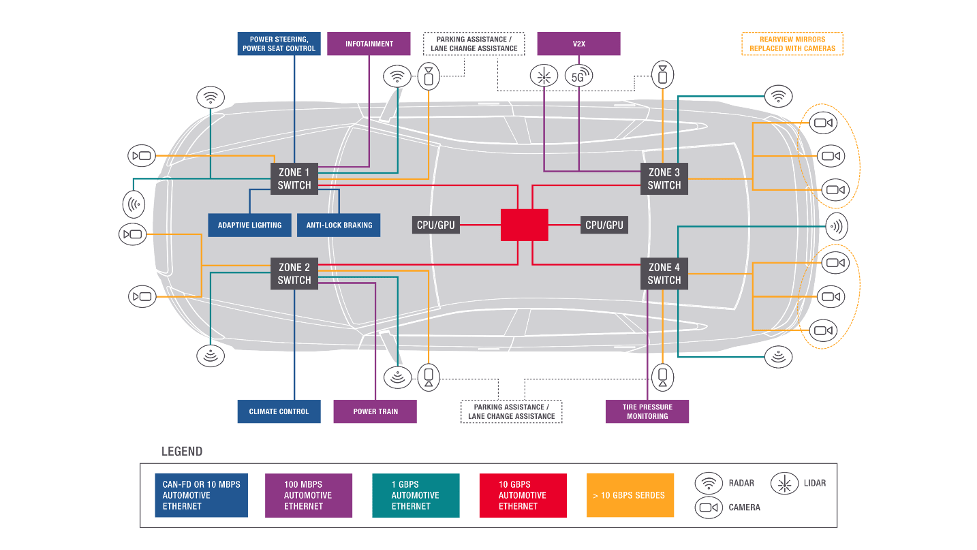
Fig. 3: En el diseño de arquitectura zonal, se utilizan múltiples interruptores zonales de diferentes velocidades para controlar varias funciones en un vehículo. Fuente: Vista clave
Las pilas de middleware que se encuentran entre el sistema operativo y el hardware serán cada vez más importantes en la arquitectura zonal, y muchas funciones de conducción autónoma, como ADAS y el frenado de emergencia se realiza mediante middleware. La calidad del servicio es clave en el middleware, incluida la priorización del tráfico de misión crítica, en tiempo real y sensible al tiempo sobre la transmisión de música.
Arm's Rill ve indicios claros de que las arquitecturas E/E automotrices cambiarán a zonales en el futuro. Señaló que el brazo esta trabajando activamente con socios del ecosistema para determinar cómo se pueden usar los controladores zonales y qué funciones se pueden alojar allí, incluidos ADAS y casos de uso relacionados con la cabina digital, además de las aplicaciones corporales. "Dados los largos ciclos de desarrollo del sector automovilístico, la transición a la arquitectura zonal llevará tiempo".
El factor legado
Sin embargo, con muchos de los protocolos de red heredados que utilizan actualmente los OEM, la transformación a una arquitectura zonal utilizando Ethernet puede ser más difícil de lo que parece. Cualquier diseño nuevo deberá funcionar al menos tan bien como los antiguos después de reemplazar los protocolos heredados. El verdadero desafío es implementar una transición fluida sin afectar la introducción de nuevos productos. Como resultado, los OEM pueden tener diferentes grados de transformación zonal y calendarios.
"La mayoría de las aplicaciones tienen un requisito de latencia y/o carga útil que respalda los aspectos operativos del vehículo, como la operación en tiempo real, por ejemplo, LIN para alta latencia/baja carga útil, Ethernet para baja latencia/alta carga útil", dijo Ray Notarantonio, director senior de segmento de experiencia del usuario de vehículos para las Américas en Infineon Technologies. En general, las redes se adaptan a esas necesidades y esto respalda la mejor relación costo-rendimiento por aplicación. Garantiza que las redes no estén ni excesivamente ni infrautilizadas por diseño.
Por otro lado, los OEM que planean pasar a un enfoque de vehículo definido por software optarán por una arquitectura zonal. "Esta fuerte zonalización incluiría la introducción de una red troncal Ethernet de múltiples Gb y de alta ingeniería que conecte más módulos zonales orientados a la seguridad, capaces de lograr un aislamiento total de los sistemas, que comparten los mismos recursos físicos", señaló Meindert van den Beld. vicepresidente senior y gerente general de redes para vehículos en NXP.
Como tal, las nuevas empresas o los nuevos OEM pueden tener más flexibilidad para adoptar una arquitectura zonal que los OEM con diseños heredados.
"La introducción de la arquitectura zonal depende en gran medida de las estrategias individuales de los OEM", dijo Sam Gold, director de marketing de productos de Renesas'Grupo de Soluciones de Computación, Analógicas y de Energía de Alto Rendimiento. “Los nuevos jugadores tienen más libertad para modificar las arquitecturas existentes, o incluso pueden empezar desde cero para implementar nuevos conceptos de arquitectura. Por otro lado, los OEM establecidos pueden enfrentar fuertes dependencias heredadas y tener una enorme variedad de modelos de automóviles con una fuerte interdependencia. Esto lleva al hecho de que sólo se pueden aplicar cambios marginales o evolutivos de la topología o arquitectura de la red. Todos los fabricantes de equipos originales comparten el objetivo general de reducir el coste, la complejidad y el peso del arnés. Aquí, también, el aspecto de la fabricación automatizada versus manual del arnés es un factor de costo importante”.
Preocupaciones de seguridad zonal
La seguridad sigue siendo una gran preocupación en el sector automotriz, y si bien en teoría una arquitectura zonal es más fácil de controlar, la etapa de transformación en la que puede haber una combinación de CAN, LIN, Ethernet y otras tecnologías puede crear nuevas vulnerabilidades. Eso significa mucho más trabajo por parte de los OEM para reducir el riesgo de ataques cibernéticos.
"La complejidad es la nueva normalidad a medida que la industria automotriz se adapta para adaptarse a pantallas y demandas de conectividad cada vez más complejas", dijo Carrie Browen, gerente de productos de la línea de negocios de vehículos autónomos de Keysight. “A medida que las redes dentro del vehículo se vuelven más rápidas y complejas, exigen un mayor nivel de pruebas para garantizar una funcionalidad consistente. No es simplemente un lujo, sino una necesidad para garantizar que cada interfaz esté protegida contra amenazas cibernéticas. Con más conexiones en el automóvil a través de CAN, Bluetooth, Automotive Ethernet, SerDes, inalámbrico, celular, por ejemplo, existe una mayor posibilidad de corrupción de información y como interfaz de amenaza potencial. Por tanto, el cumplimiento de las normativas (ISO/SAE 21434 y UN-R155) y la validación de las propias redes son necesarios durante el diseño, validación y producción”.
Notarantonio de Infineon estuvo de acuerdo. “La seguridad de la red es un estándar en los vehículos desde hace varios años. Los mensajes se autentican con módulos de seguridad de hardware y software dedicado en un dominio seguro. Las redes CAN y CAN-FD estuvieron entre las primeras en agregar seguridad, y esto no ha hecho más que expandirse desde entonces. Hoy en día se están tomando decisiones para proteger nuevas redes como Ethernet en los vehículos, algunas seleccionan MACSEC y otras IPSEC, pero nada queda sin proteger”.
Al mismo tiempo, con cada vez más conectividad con el vehículo, las redes automotrices deben diseñarse con una gestión obligatoria de los riesgos de ciberseguridad.
"Los OEM deberían desarrollar una defensa en profundidad, pero también permitir la agilidad criptográfica", dijo Gold de Renesas. “La defensa en profundidad debe tener en cuenta la protección de la comunicación externa del vehículo (por ejemplo, TLS, autenticación I/F externa) y la protección de la comunicación interna (por ejemplo, IDS/IPS, TLS, MACsec, IPsec, SecOC). Los registros de seguridad Algunos de los mecanismos de protección anteriores pueden ser analizados por un centro de operaciones de seguridad del vehículo que puede, si es necesario, implementar parches de seguridad a través de firmware inalámbrico para mitigar las amenazas cibernéticas a las redes automotrices del vehículo. Se debe considerar la agilidad de las criptas para admitir actualizaciones de protocolos de redes automotrices debido a claves de mayor longitud y/o sistemas criptográficos rotos. Se está considerando la criptografía poscuántica como algoritmo de próxima generación. Se deben definir arquitecturas apropiadas para evitar cuellos de botella de seguridad (por ejemplo, procesamiento de seguridad distribuido)”.
Adopción de OEM
Si bien es difícil predecir cuándo exactamente los OEM implementarán redes 100% Ethernet, la mayoría de los OEM están avanzando hacia el uso de Ethernet en diseños actuales y futuros. Bar-Niv de Marvell sugirió que la tasa de adopción se acelerará en los próximos años.
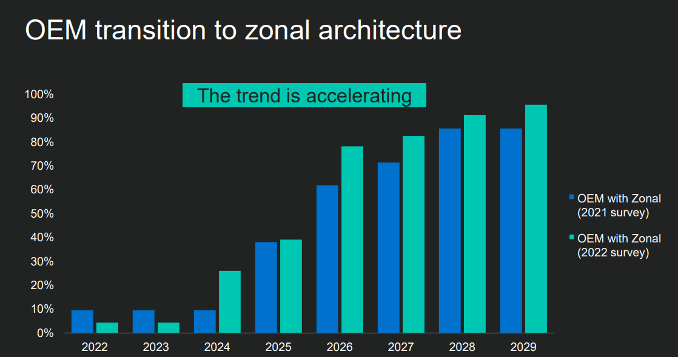
Fig. 4: Se espera que la adopción de la arquitectura zonal se acelere en los próximos años. Fuente: Marvell
De hecho, la adopción ya ha comenzado. BMW fue uno de los primeros en incorporar Ethernet en sus vehículos. En 2021, introdujo Gigabit Ethernet en su modelo de producción BMW iX. Hoy en día, Ethernet se utiliza en todos los modelos de producción.
Hyundai, como todos los demás fabricantes de equipos originales, informó que utiliza el modelo híbrido de CAN y Ethernet. Su Kona y Santa Fe son ejemplos de modelos que utilizan Ethernet para admitir OTA. Mercedes-Benz utiliza una combinación de Ethernet y CAN/LIN. En 2013, sus modelos 222 (Clase S) usaban CAN y LIN 2.1 para la mayoría de los controles mientras usaban Ethernet para las luces de señalización. En 2020, la línea 223 (Clase S) de Mercedes-Benz utilizaba Ethernet para la comunicación entre dominios principales. A partir de 2024, Audi introducirá una arquitectura E/E (E3) completamente nueva basada en la plataforma Premium Electric descentralizada, que ampliará la tecnología Ethernet mediante la inclusión de una red troncal de alta velocidad.
Si bien la mayoría de los fabricantes de equipos originales incorporan Ethernet en sus diseños, los modelos Toyota no son compatibles con Ethernet en este momento.
Mientras tanto, los OEM estadounidenses están avanzando hacia arquitecturas zonales. "Parte del enfoque zonal es conectar los centros de computación de alto rendimiento a todas las funciones que hacen que un automóvil sea un automóvil, y hacerlo integrando más funciones en una sola zona", observó Notarantonio de Infineon. "La integración puede ayudar a reducir el costo de los materiales y la complejidad del mazo de cables".
Además, estos OEM están yendo más allá de simplemente agregar una función o agregar una ECU, ya que esto contribuye de manera importante a la complejidad del mazo de cables y del software, dijo.
En Japón, los objetivos son similares. Pero allí, los OEM han seleccionado arquitecturas basadas en dominios para construir sus vehículos. "En cualquier caso, permiten la mayoría de las actualizaciones en los nodos centrales y actualizaciones limitadas en zonas o dominios, pero los vehículos definidos por software son el camino futuro para reducir la complejidad del software y del mazo de cables", dijo Notarantonio.
Visión de futuro
Según lo que los OEM están haciendo hoy en día, es seguro asumir que las arquitecturas zonales seguirán ganando impulso. Además de simplificar el diseño automotriz, una arquitectura automotriz zonal crea nuevas oportunidades para la cadena de suministro.
"La arquitectura zonal, una solución potencial para reducir la complejidad de la red automotriz, permite a los OEM simplificar el cableado y las vías de comunicación organizando los sistemas electrónicos de un vehículo en zonas, donde cada zona maneja funciones específicas para lograr ahorros de costos, mayor eficiencia y mayor confiabilidad", señaló Mei Ching. (Maggie) Lim, soporte de soluciones de línea comercial de vehículos autónomos en Keysight. "Un objetivo principal, reducir el peso y la complejidad del mazo de cables, está en desacuerdo con la demanda de aumentar el rendimiento de datos utilizando tecnologías de comunicación de mayor velocidad".
Además, exigir la operación del canal de comunicación en distancias más largas, utilizando conectores en línea para unir múltiples segmentos de red, impone requisitos estrictos en cuanto al rendimiento eléctrico. "Esto significa que los estándares emergentes deben definir rigurosamente la pérdida de canal permitida y los métodos de prueba deben validar el rendimiento", dijo Lim. “Los requisitos de la aplicación determinan la elección de la arquitectura E/E. Agregar varios sensores en un solo enlace para reducir el peso y el costo del cable genera mayores requisitos de rendimiento. El aumento de la eficiencia y la confiabilidad, así como la reducción del peso, son factores importantes. Sin embargo, que la arquitectura zonal llegue a ser predominante depende de una serie de factores, incluidos los avances tecnológicos, la adopción de la industria y las necesidades cambiantes del ecosistema automotriz. El nivel de autonomía, los requisitos de conectividad y las consideraciones de costos son factores. La industria es dinámica y la evolución de la arquitectura automotriz dependerá de los continuos desarrollos tecnológicos y de la implementación exitosa de estos conceptos en aplicaciones del mundo real”.
Además, las arquitecturas zonales prometen escalabilidad, además de la consolidación de ECU, red y cableado UTP/STP, lo que ayuda a reducir los costos generales en comparación con una arquitectura distribuida/basada en dominio. "Las actualizaciones de software OTA permiten a los OEM proporcionar funciones o servicios adicionales durante el ciclo de vida de un vehículo, y las arquitecturas zonales mejorarán significativamente el proceso OTA", añadió Schweiger de Cadence.
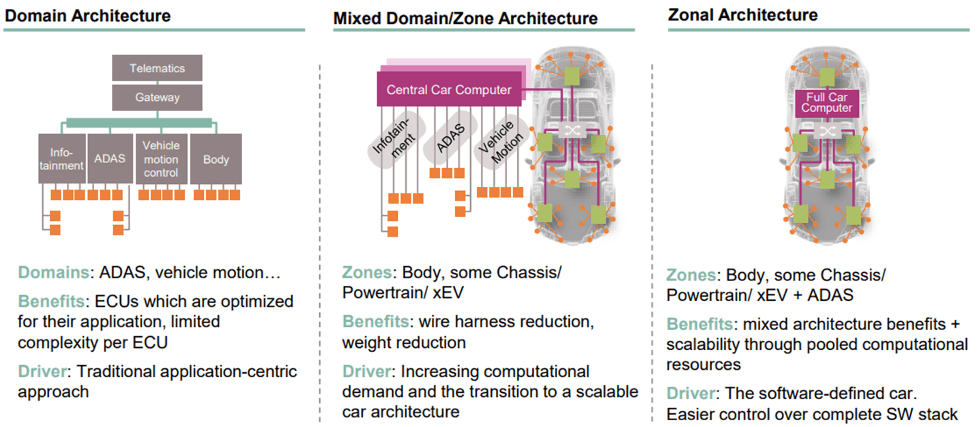
Fig. 5: En un futuro próximo, las arquitecturas de dominio y zonales coexistirán. Fuente: Infineon
Si bien se considera que las arquitecturas zonales son el futuro, la transformación llevará tiempo. Algunos OEM están avanzando a toda velocidad, mientras que otros continúan admitiendo arquitecturas de dominio. Como resultado, es probable que en el futuro previsible siga habiendo una combinación de protocolos de red utilizados en el diseño de automóviles.
OTRAS LECTURAS
Para los SDV, el software es el mayor desafío
Los problemas crecerán exponencialmente a medida que los vehículos definidos por software ganen terreno.
La complejidad automotriz y la solidez de la cadena de suministro exigen colaboración tecnológica
Las relaciones en el ecosistema automotriz se extienden hacia profundos desarrollos técnicos a medida que la industria gira hacia la electrificación y la autonomía.
- Distribución de relaciones públicas y contenido potenciado por SEO. Consiga amplificado hoy.
- PlatoData.Network Vertical Generativo Ai. Empodérate. Accede Aquí.
- PlatoAiStream. Inteligencia Web3. Conocimiento amplificado. Accede Aquí.
- PlatoESG. Carbón, tecnología limpia, Energía, Ambiente, Solar, Gestión de residuos. Accede Aquí.
- PlatoSalud. Inteligencia en Biotecnología y Ensayos Clínicos. Accede Aquí.
- Fuente: https://semiengineering.com/auto-network-speeds-rise-as-carmakers-prep-for-autonomy/

