19 de noviembre de 2023 (Noticias de Nanowerk) Durante décadas, los científicos han imaginado un futuro en el que robots ágiles podrían atravesar terrenos accidentados y meterse en espacios reducidos, ideal para misiones de búsqueda y rescate, inspección industrial y procedimientos médicos. Sin embargo, los robots rígidos tradicionales construidos con materiales duros como los metales han demostrado ser inadecuados para navegar en entornos impredecibles. Como resultado, los investigadores han recurrido a la robótica blanda y han construido máquinas flexibles a partir de polímeros elásticos e hidrogeles. Pero crear robots blandos verdaderamente eficaces ha demostrado ser un desafío duradero. Una dificultad central es la locomoción. A diferencia de los robots convencionales con ruedas o patas, los robots continuos blandos carecen de articulaciones discretas. Las posibles soluciones, como combustibles químicos y redes neumáticas integradas, añaden volumen y reducen la durabilidad. Esto ha estimulado el interés en la actuación remota que utiliza luz para inducir movimiento de forma inalámbrica estimulando materiales que cambian de color. El control óptico permite una activación rápida y precisa sin componentes integrados voluminosos. Se han demostrado varios robots blandos impulsados por luz, pero hasta ahora la mayoría se basa en intrincadas geometrías impresas en 3D para producir propulsión neta hacia adelante a partir de la expansión-contracción isotrópica de geles fotosensibles. Estos diseños estructurales complejos son difíciles de fabricar y requieren procesos elaborados de varios pasos y equipos especializados costosos. Los actuadores planos más simples que se contraen y se hinchan simétricamente tienden a simplemente oscilar en su lugar. Como resultado, los robots blandos impulsados por luz existentes suelen ser lentos, ineficientes, limitados a entornos limitados como líquidos e incapaces de imitar la locomoción terrestre robusta. Ahora, investigadores de la Universidad de Tecnología Química de Beijing han desarrollado robots rastreros suaves que se mueven como lombrices cuando son iluminados por luz infrarroja. Su enfoque combina películas de polímero de cristal líquido (LCP) fácilmente disponibles con una estructura de cerdas bioinspirada, proporcionando tracción direccional en superficies planas sin complejas impresiones 3D. Esto marca un paso importante hacia robots blandos prácticos que pueden atravesar la variabilidad de los entornos del mundo real. Los hallazgos han sido publicados en Sistemas inteligentes avanzados (“Robot blando rastreable impulsado por energía fototérmica con estructura de cerdas biónicas similares a las de una lombriz de tierra”).
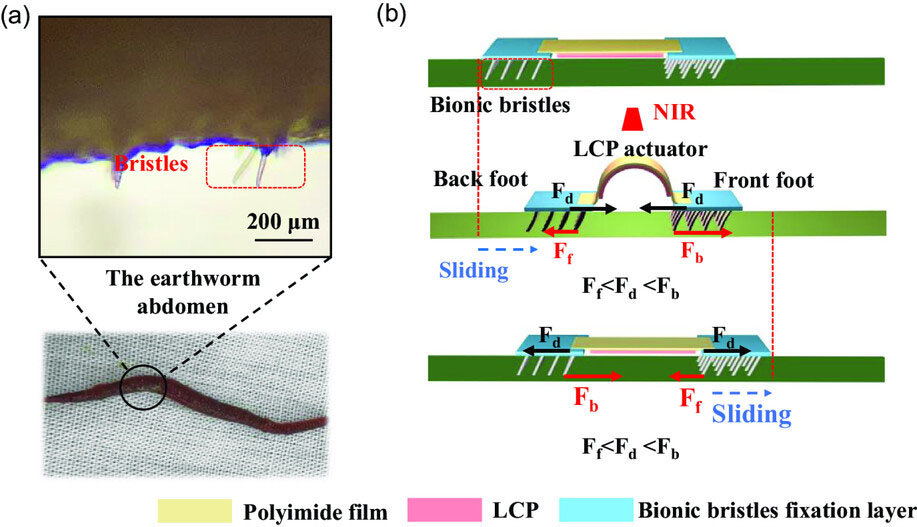 Principio biónico de los robots blandos. a) La lombriz y el primer plano de las cerdas en su abdomen. b) Ilustraciones esquemáticas del principio de movimiento de un robot blando con cerdas biónicas bajo conducción fototérmica. (Reimpreso con autorización de Wiely-VCH Verlag) Los investigadores se inspiraron en las lombrices de tierra, que utilizan hileras de cerdas en ángulo en su parte inferior para generar asimetría y empujarse hacia adelante cuando los músculos se contraen. En teoría, la integración de cerdas similares con un material fotorreactivo podría producir un rastreo activado de forma remota por la luz.
Los LCP surgieron como un material actuador ideal debido a sus cambios de longitud reversibles inducidos por la luz infrarroja. A bajas temperaturas, las moléculas de LCP se alinean, lo que hace que la película se alargue y se enderece. La irradiación infrarroja eleva la temperatura lo suficiente como para aleatorizar y acortar las moléculas de LCP. Este efecto fototérmico es rápido, repetible y genera tensiones sustanciales capaces de realizar trabajo mecánico.
Las películas de LCP proporcionaron el "músculo", mientras que las cerdas crearon fuerzas de fricción direccionales. Las cerdas inclinadas hacia atrás se deslizaban fácilmente hacia adelante pero resistían el deslizamiento hacia atrás, tal como la anatomía de las lombrices de tierra. Esto permitió que la contracción periódica del LCP tirara las cerdas hacia la luz infrarroja, mientras que la relajación del LCP devolvía las cerdas a su orientación inicial. El ajuste de la fuerza del actuador LCP permitió secuencias repetitivas que avanzaban sobre superficies planas de papel.
Para realizar este diseño bioinspirado fue necesario identificar configuraciones óptimas de cerdas e integrar los componentes en un robot multisegmento eficaz. Las pruebas sistemáticas de los ángulos y longitudes de las cerdas revelaron que una inclinación hacia atrás de 60° maximizaba la asimetría en el papel, y las cerdas más largas aumentaban la fricción desproporcionadamente contra el movimiento hacia atrás. Esto permitió que la contracción del LCP superara fuerzas de fricción hacia adelante más pequeñas.
Los investigadores construyeron robots de tres partes con secciones de cerdas conectadas hacia adelante y hacia atrás mediante un actuador LCP centrado. Esto permitió que las cerdas se deslizaran de forma independiente en lugar de simplemente flexionarse en su lugar. El ajuste del número de capas de LCP adaptó la fuerza del actuador para que coincidiera con la fricción de las cerdas. Demasiado débil y el robot se esforzó pero no se deslizó; demasiado fuerte y las cerdas se rompieron. Con el equilibrio adecuado, los robots se arrastraban continuamente a más de 4 mm/min cuando se los iluminaba con luz infrarroja en escala de milivatios desde distancias de hasta 15 cm.
La variación de la intensidad de los infrarrojos y la longitud del actuador modulaban aún más la velocidad y la zancada, destacando la versatilidad del enfoque. La simplicidad de los componentes y el proceso de fabricación apunta hacia aplicaciones como cámaras de inspección que podrían atravesar grietas y hendiduras inaccesibles a los robots convencionales.
Esta novedosa integración de asimetría bioinspirada y materiales fotorresponsables resuelve un desafío clave que ha limitado a los robots blandos impulsados por luz. La locomoción sin complejos movimientos 3D programados ni la dependencia de las características ambientales hace que esta estrategia sea más adaptable y escalable. A continuación, los investigadores pretenden maximizar la velocidad de rastreo y la eficiencia. A largo plazo, imaginan posibilidades como robots sobrevivientes que se arrastran entre los escombros en busca de sobrevivientes o construyen infraestructura en otros planetas.
Al imitar las elegantes soluciones de la naturaleza, la robótica blanda continúa haciendo más tangible la visión de las máquinas robóticas de músculos artificiales del mundo real.
Principio biónico de los robots blandos. a) La lombriz y el primer plano de las cerdas en su abdomen. b) Ilustraciones esquemáticas del principio de movimiento de un robot blando con cerdas biónicas bajo conducción fototérmica. (Reimpreso con autorización de Wiely-VCH Verlag) Los investigadores se inspiraron en las lombrices de tierra, que utilizan hileras de cerdas en ángulo en su parte inferior para generar asimetría y empujarse hacia adelante cuando los músculos se contraen. En teoría, la integración de cerdas similares con un material fotorreactivo podría producir un rastreo activado de forma remota por la luz.
Los LCP surgieron como un material actuador ideal debido a sus cambios de longitud reversibles inducidos por la luz infrarroja. A bajas temperaturas, las moléculas de LCP se alinean, lo que hace que la película se alargue y se enderece. La irradiación infrarroja eleva la temperatura lo suficiente como para aleatorizar y acortar las moléculas de LCP. Este efecto fototérmico es rápido, repetible y genera tensiones sustanciales capaces de realizar trabajo mecánico.
Las películas de LCP proporcionaron el "músculo", mientras que las cerdas crearon fuerzas de fricción direccionales. Las cerdas inclinadas hacia atrás se deslizaban fácilmente hacia adelante pero resistían el deslizamiento hacia atrás, tal como la anatomía de las lombrices de tierra. Esto permitió que la contracción periódica del LCP tirara las cerdas hacia la luz infrarroja, mientras que la relajación del LCP devolvía las cerdas a su orientación inicial. El ajuste de la fuerza del actuador LCP permitió secuencias repetitivas que avanzaban sobre superficies planas de papel.
Para realizar este diseño bioinspirado fue necesario identificar configuraciones óptimas de cerdas e integrar los componentes en un robot multisegmento eficaz. Las pruebas sistemáticas de los ángulos y longitudes de las cerdas revelaron que una inclinación hacia atrás de 60° maximizaba la asimetría en el papel, y las cerdas más largas aumentaban la fricción desproporcionadamente contra el movimiento hacia atrás. Esto permitió que la contracción del LCP superara fuerzas de fricción hacia adelante más pequeñas.
Los investigadores construyeron robots de tres partes con secciones de cerdas conectadas hacia adelante y hacia atrás mediante un actuador LCP centrado. Esto permitió que las cerdas se deslizaran de forma independiente en lugar de simplemente flexionarse en su lugar. El ajuste del número de capas de LCP adaptó la fuerza del actuador para que coincidiera con la fricción de las cerdas. Demasiado débil y el robot se esforzó pero no se deslizó; demasiado fuerte y las cerdas se rompieron. Con el equilibrio adecuado, los robots se arrastraban continuamente a más de 4 mm/min cuando se los iluminaba con luz infrarroja en escala de milivatios desde distancias de hasta 15 cm.
La variación de la intensidad de los infrarrojos y la longitud del actuador modulaban aún más la velocidad y la zancada, destacando la versatilidad del enfoque. La simplicidad de los componentes y el proceso de fabricación apunta hacia aplicaciones como cámaras de inspección que podrían atravesar grietas y hendiduras inaccesibles a los robots convencionales.
Esta novedosa integración de asimetría bioinspirada y materiales fotorresponsables resuelve un desafío clave que ha limitado a los robots blandos impulsados por luz. La locomoción sin complejos movimientos 3D programados ni la dependencia de las características ambientales hace que esta estrategia sea más adaptable y escalable. A continuación, los investigadores pretenden maximizar la velocidad de rastreo y la eficiencia. A largo plazo, imaginan posibilidades como robots sobrevivientes que se arrastran entre los escombros en busca de sobrevivientes o construyen infraestructura en otros planetas.
Al imitar las elegantes soluciones de la naturaleza, la robótica blanda continúa haciendo más tangible la visión de las máquinas robóticas de músculos artificiales del mundo real.
Principio biónico de los robots blandos. a) La lombriz y el primer plano de las cerdas en su abdomen. b) Ilustraciones esquemáticas del principio de movimiento de un robot blando con cerdas biónicas bajo conducción fototérmica. (Reimpreso con autorización de Wiely-VCH Verlag) Los investigadores se inspiraron en las lombrices de tierra, que utilizan hileras de cerdas en ángulo en su parte inferior para generar asimetría y empujarse hacia adelante cuando los músculos se contraen. En teoría, la integración de cerdas similares con un material fotorreactivo podría producir un rastreo activado de forma remota por la luz.
Los LCP surgieron como un material actuador ideal debido a sus cambios de longitud reversibles inducidos por la luz infrarroja. A bajas temperaturas, las moléculas de LCP se alinean, lo que hace que la película se alargue y se enderece. La irradiación infrarroja eleva la temperatura lo suficiente como para aleatorizar y acortar las moléculas de LCP. Este efecto fototérmico es rápido, repetible y genera tensiones sustanciales capaces de realizar trabajo mecánico.
Las películas de LCP proporcionaron el "músculo", mientras que las cerdas crearon fuerzas de fricción direccionales. Las cerdas inclinadas hacia atrás se deslizaban fácilmente hacia adelante pero resistían el deslizamiento hacia atrás, tal como la anatomía de las lombrices de tierra. Esto permitió que la contracción periódica del LCP tirara las cerdas hacia la luz infrarroja, mientras que la relajación del LCP devolvía las cerdas a su orientación inicial. El ajuste de la fuerza del actuador LCP permitió secuencias repetitivas que avanzaban sobre superficies planas de papel.
Para realizar este diseño bioinspirado fue necesario identificar configuraciones óptimas de cerdas e integrar los componentes en un robot multisegmento eficaz. Las pruebas sistemáticas de los ángulos y longitudes de las cerdas revelaron que una inclinación hacia atrás de 60° maximizaba la asimetría en el papel, y las cerdas más largas aumentaban la fricción desproporcionadamente contra el movimiento hacia atrás. Esto permitió que la contracción del LCP superara fuerzas de fricción hacia adelante más pequeñas.
Los investigadores construyeron robots de tres partes con secciones de cerdas conectadas hacia adelante y hacia atrás mediante un actuador LCP centrado. Esto permitió que las cerdas se deslizaran de forma independiente en lugar de simplemente flexionarse en su lugar. El ajuste del número de capas de LCP adaptó la fuerza del actuador para que coincidiera con la fricción de las cerdas. Demasiado débil y el robot se esforzó pero no se deslizó; demasiado fuerte y las cerdas se rompieron. Con el equilibrio adecuado, los robots se arrastraban continuamente a más de 4 mm/min cuando se los iluminaba con luz infrarroja en escala de milivatios desde distancias de hasta 15 cm.
La variación de la intensidad de los infrarrojos y la longitud del actuador modulaban aún más la velocidad y la zancada, destacando la versatilidad del enfoque. La simplicidad de los componentes y el proceso de fabricación apunta hacia aplicaciones como cámaras de inspección que podrían atravesar grietas y hendiduras inaccesibles a los robots convencionales.
Esta novedosa integración de asimetría bioinspirada y materiales fotorresponsables resuelve un desafío clave que ha limitado a los robots blandos impulsados por luz. La locomoción sin complejos movimientos 3D programados ni la dependencia de las características ambientales hace que esta estrategia sea más adaptable y escalable. A continuación, los investigadores pretenden maximizar la velocidad de rastreo y la eficiencia. A largo plazo, imaginan posibilidades como robots sobrevivientes que se arrastran entre los escombros en busca de sobrevivientes o construyen infraestructura en otros planetas.
Al imitar las elegantes soluciones de la naturaleza, la robótica blanda continúa haciendo más tangible la visión de las máquinas robóticas de músculos artificiales del mundo real.
- Distribución de relaciones públicas y contenido potenciado por SEO. Consiga amplificado hoy.
- PlatoData.Network Vertical Generativo Ai. Empodérate. Accede Aquí.
- PlatoAiStream. Inteligencia Web3. Conocimiento amplificado. Accede Aquí.
- PlatoESG. Carbón, tecnología limpia, Energía, Ambiente, Solar, Gestión de residuos. Accede Aquí.
- PlatoSalud. Inteligencia en Biotecnología y Ensayos Clínicos. Accede Aquí.
- Fuente: https://www.nanowerk.com/news2/robotics/newsid=64071.php

